いろいろと挑戦しているけれど、Pythonで/amcl_pose座標がとれていないみたいです。
まぁ、Python自体初めて触るので仕方がないといえば仕方がないんですけどね。
ちょっと、嫌になりかけたので強引な手段で課題を消化してしまう事にしました。
残念ながら、私の環境ではRVIZを動かしていると「RecordMyDesktop」でもフレーム落ちするので、RVIZは停止して動画を撮りました。
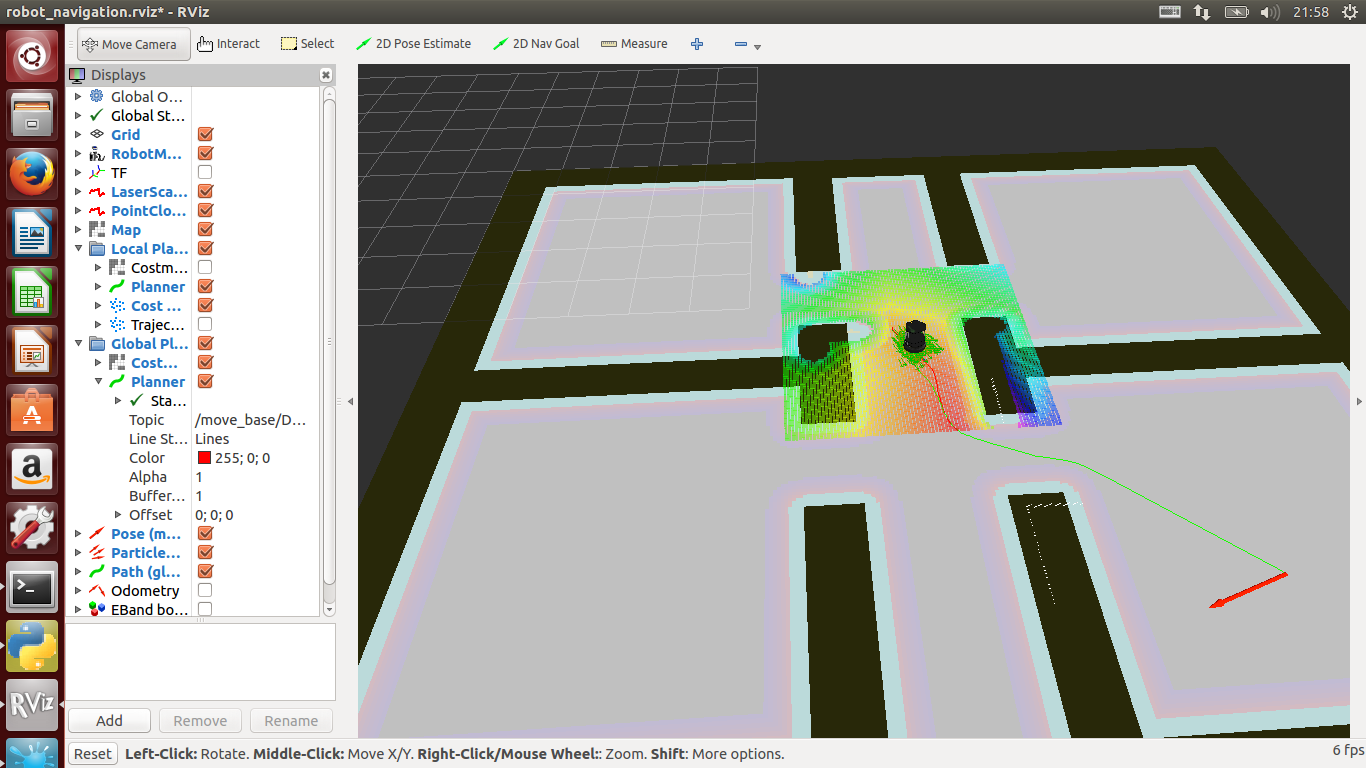
お題は、6つの部屋を1部屋ごと訪ねていって、最終的に元に戻るですから
一見うまく動いている様に見えます。
しかし、実際は部屋の移動が終わる時間を見計らって、ゴール地点を変えているだけですから、課題ができたとは言えませんね。
ソースはこちら
#!/usr/bin/env python
# vim: fileencoding=utf-8
# rospy のインポート
import rospy
# 数学ライブラリ
import math
# タイマーのインポート
import time
# 今回主に使うROSメッセージ型をインポート
from geometry_msgs.msg import Quaternion, PoseStamped, PoseWithCovarianceStamped
# 幾何学変換のための関数
from tf.transformations import quaternion_from_euler
# ノードの初期化
rospy.init_node('exercise')
# ゴール配信者オブジェクトを生成
goal_pub = rospy.Publisher('/move_base_simple/goal', # トピック名
PoseStamped, # 型
queue_size=1, # 送信キューのサイズ
latch=True) # データを次の更新まで保持する
# 現在位置を読み込むオブジェクトを生成
pose_sub = rospy.Subscriber('/amcl_pose/pose/pose/postion/x', # トピック名
PoseWithCovarianceStamped) # 型
# 次のゴールのメッセージを生成して初期化
print "Step1"
goal = PoseStamped()
goal.header.frame_id = 'world' # 世界座標系で指定する
goal.header.stamp = rospy.Time.now() # タイムスタンプは今の時間
goal.pose.position.x = 9.5
goal.pose.position.y = 3.5
goal.pose.position.z = 0.0
q = quaternion_from_euler(0, 0, math.radians(90))
goal.pose.orientation = Quaternion(*q)
goal_pub.publish(goal) # 実際にメッセージを配信
amcl_pose = PoseWithCovarianceStamped()
#amcl_pose.pose.pose.position.x,yを取れないよう〜
time.sleep(30) #タイマーで誤魔化しています
print "Step2"
goal = PoseStamped()
goal.header.frame_id = 'world' # 世界座標系で指定する
goal.header.stamp = rospy.Time.now() # タイムスタンプは今の時間
goal.pose.position.x = 16.0
goal.pose.position.y = 3.5
goal.pose.position.z = 0.0
q = quaternion_from_euler(0, 0, math.radians(90))
goal.pose.orientation = Quaternion(*q)
goal_pub.publish(goal) # 実際にメッセージを配信
time.sleep(30)
print "Step3"
goal = PoseStamped()
goal.header.frame_id = 'world' # 世界座標系で指定する
goal.header.stamp = rospy.Time.now() # タイムスタンプは今の時間
goal.pose.position.x = 3.5
goal.pose.position.y = 11.5
goal.pose.position.z = 0.0
q = quaternion_from_euler(0, 0, math.radians(90))
goal.pose.orientation = Quaternion(*q)
goal_pub.publish(goal) # 実際にメッセージを配信
time.sleep(30)
print "Step4"
goal = PoseStamped()
goal.header.frame_id = 'world' # 世界座標系で指定する
goal.header.stamp = rospy.Time.now() # タイムスタンプは今の時間
goal.pose.position.x = 9.5
goal.pose.position.y = 11.5
goal.pose.position.z = 0.0
q = quaternion_from_euler(0, 0, math.radians(90))
goal.pose.orientation = Quaternion(*q)
goal_pub.publish(goal) # 実際にメッセージを配信
time.sleep(30)
print "Step5"
goal = PoseStamped()
goal.header.frame_id = 'world' # 世界座標系で指定する
goal.header.stamp = rospy.Time.now() # タイムスタンプは今の時間
goal.pose.position.x = 16.0
goal.pose.position.y = 11.5
goal.pose.position.z = 0.0
q = quaternion_from_euler(0, 0, math.radians(90))
goal.pose.orientation = Quaternion(*q)
goal_pub.publish(goal) # 実際にメッセージを配信
time.sleep(30)
print "Step6"
goal = PoseStamped()
goal.header.frame_id = 'world' # 世界座標系で指定する
goal.header.stamp = rospy.Time.now() # タイムスタンプは今の時間
goal.pose.position.x = 3.5
goal.pose.position.y = 3.5
goal.pose.position.z = 0.0
q = quaternion_from_euler(0, 0, math.radians(90))
goal.pose.orientation = Quaternion(*q)
goal_pub.publish(goal) # 実際にメッセージを配信
# Ctrl−Cで中断するまでポーリング
rate = rospy.Rate(10)
while not rospy.is_shutdown():
rate.sleep()
pythonの参考書を密林で見つけてぽちったので、参考書待ちです。